

Gripper for Automation Application
Sarholz Engineering • 11. Juli 2024
Topology Optimization of a convex Gripper
weight reduction of a gripper for high-speed application
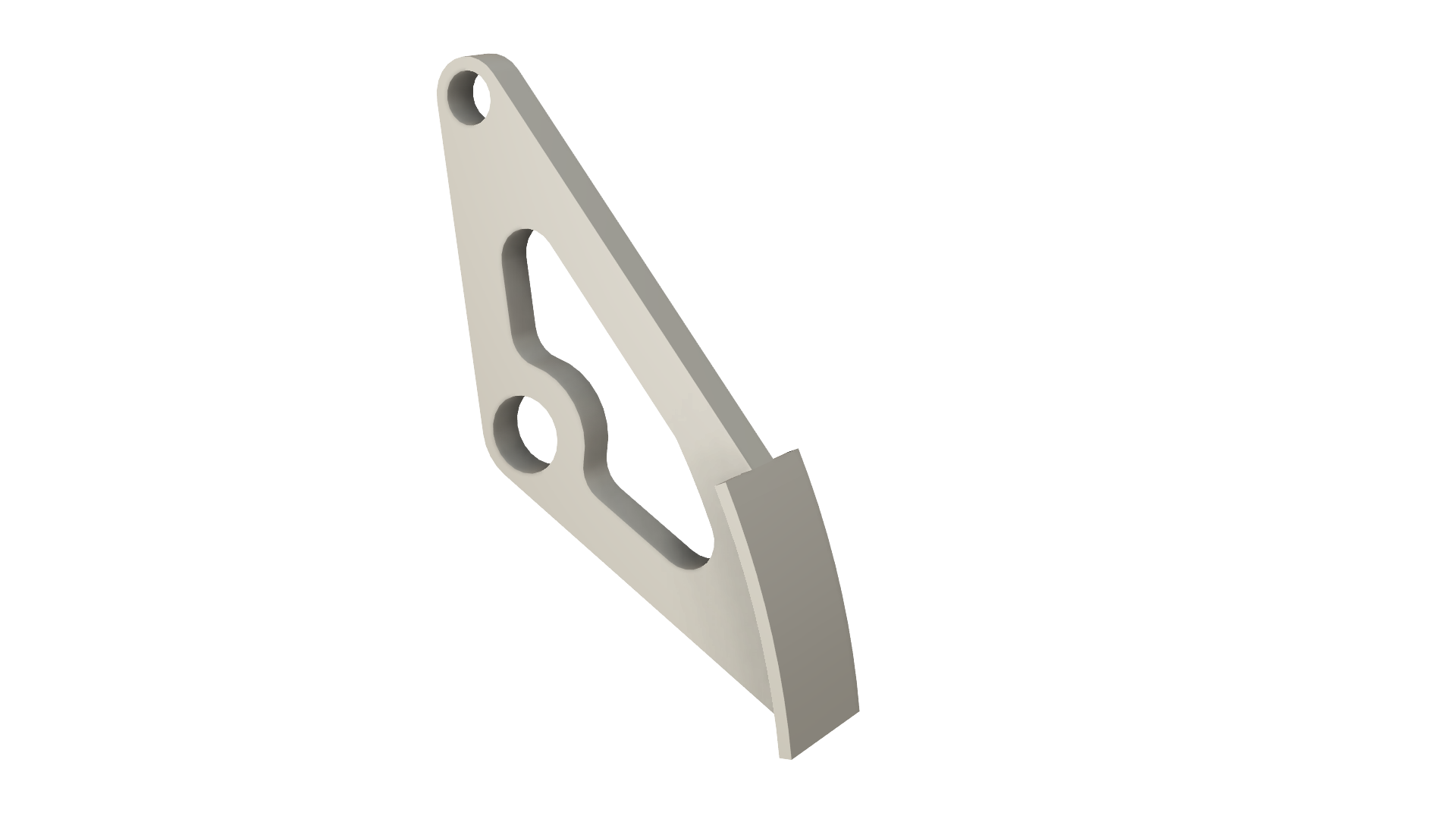
The original part is CNC-machined from two sides. It consists of a convex gripping surface and base with two through-holes. The Gripper pivots around the hole at the top. The force is applied through the bearing closest to the gripper.
- Material: EN AW 7075-T6
- Process: milled (2.5 axis)
- Weight: 34 g
- mass moment of inertia: 1.27e-4 Kg*m^2
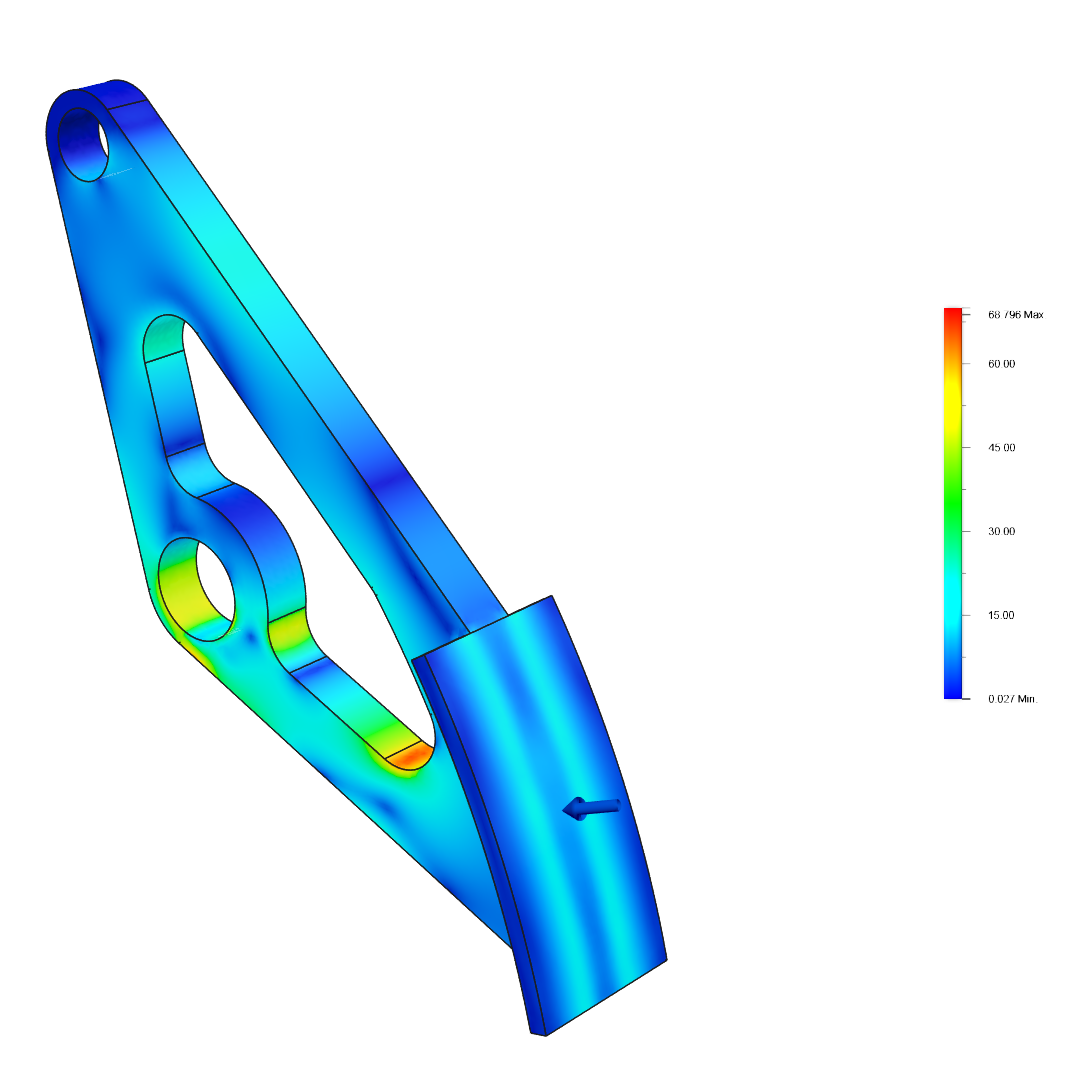
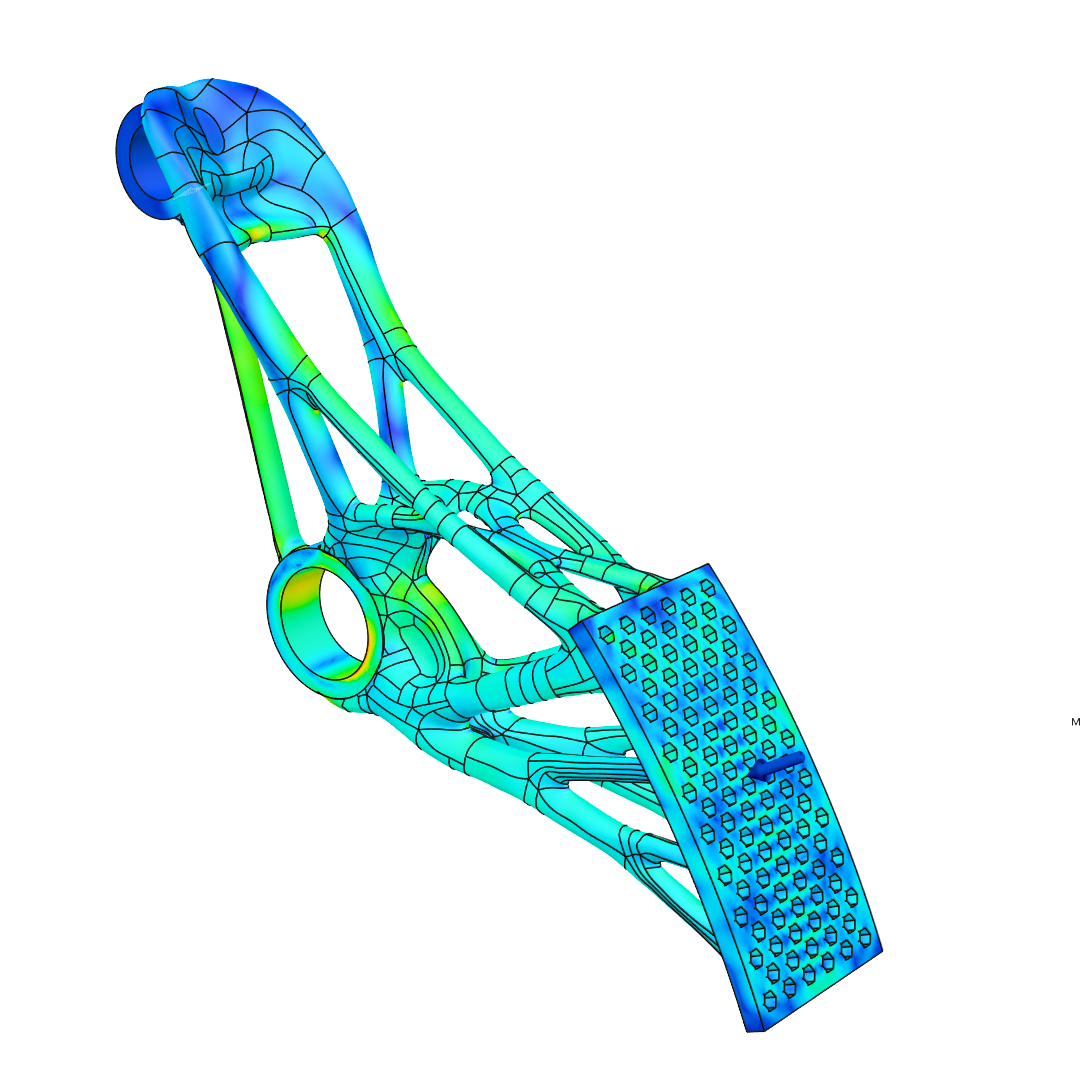
The optimized Design results in a more even stress-distribution with lower peaks. The weight and moment of inertia are reduced by almost 50%.
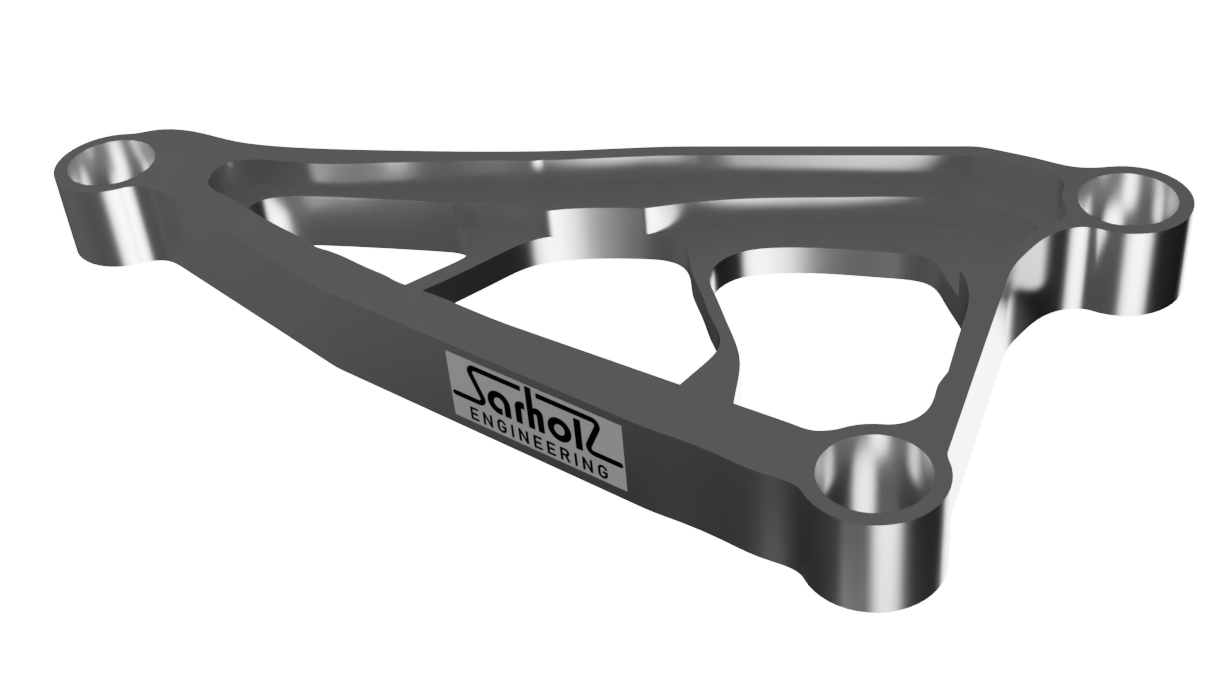
- Material: AlSi10Mg
- Process: 3D-Printed (SLM)
- Weight: 19 g (reduced by 45%)
- mass moment of inertia: 0.65e-4 Kg*m^2 (reduced by 49%)

Design of an 3D-printed transitional hopper

Design of an adjustable vacuum Gripper for End of Arm application

Design of a Laser engraving Fixture with removable 3D-printed Seat for various Parts

development of a lightweight suspension Link with high torsion stiffness

optimizing the Diaphragm Holder in an Electrodynamic Drive
Optimization of a Lever